Aerial Platforms
In the last decades, Unmanned Aerial Vehicles (UAVs) have gained much popularity because of their high maneuverability and autonomy, becoming a mature technology exploited in the civil, rural, industrial, and military contexts. Nowadays, such aerial platforms are employed in several application fields ranging from classical visual sensing and monitoring tasks to the modern physical-human and environment – interaction. In this framework, the main control issues involve the stabilization of the platform in a certain position while keeping a constant attitude (hovering task) and the chase of an object or desired path in the presence of obstacles and disturbances (robust trajectory tracking task).
A popular research direction within the UAVs context concerns the control of swarms of aerial platforms that are required to behave as cooperative multi-agent systems. In this case, the principal control tasks consist on the stabilization of the formation of the mobile aerial robots towards some desired spatial arrangement (formation stabilization) and/or the fulfillment of some desired motions while preserving some structural system properties (formation coordinated motion).

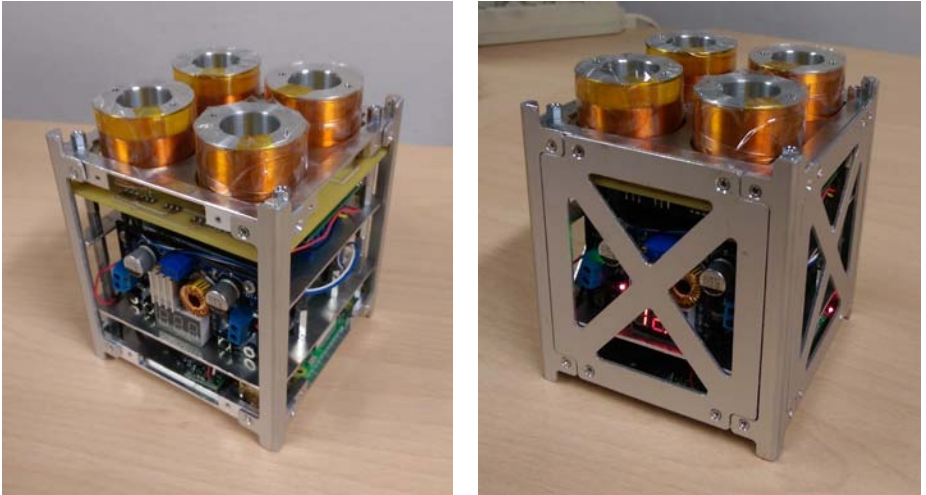
Nano Satellites
Small – micro and nano – satellites are very appealing in the space community for their low complexity and high flexibility. Several proposed mission concepts foresee the employment of miniature spacecraft for various applications, often economically unfeasible with traditional satellites. The development of miniaturized and standardized space vehicles may considerably reduce the design, manufacturing and launch costs involved. As a consequence, the design and control of small satellites represent a hot challenge in the space research field: particular attention is devoted to the components and sensors selection whose choice is often driven by the desired control task (e.g., hard/soft docking, rendez-vous, assembly).
Ground Vehicles
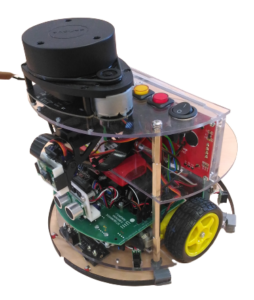 In the last years, the interest in autonomous vehicles has rapidly grown in industrial environments. This popularity rests on the optimized workflow perspective entailing the partial/entire removal of human personnel from hazardous situations.
In the last years, the interest in autonomous vehicles has rapidly grown in industrial environments. This popularity rests on the optimized workflow perspective entailing the partial/entire removal of human personnel from hazardous situations.
The main research topics concern active sensing, through the use of various devices (camera, lidar, sonar, IMU, GPS, Wifi Antenna,…), path planning, which must take into account a collision avoidance technique alongside a trajectory management solution, and motion control, which represent the fundamental part to an autonomous vehicle.
Sensor Networks
A sensor network is a multi-agent system generally made up of a collection of spatially distributed devices capable of communicating over a wireless network. Visual Sensor Network, in particular, consists of networked camera groups: by acquiring information-rich data, this kind of technology is deployed in many pervasive applications.
Thanks to the increasing advances in embedded devices for sensing, processing, and communicating data, cameras are becoming heterogeneous and smart, meaning that they actively combine video sensing, processing, and communication on a single embedded platform. Network integration completely exploits their innovative capacity, in which the information is shared by all the nodes and can be used to automatically perform complex tasks like automatic calibration, cooperative task assignment and decision taking, self-reconfiguration and environment adaptation.
